批量归一化#
**批量归一化(Batch Normalization)**于 2015 年在论文 Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift 中被提出,对深度学习领域产生了重大影响。如今,归一化技术(如 BatchNorm、LayerNorm 或 GroupNorm 等)几乎已成为标准操作。
核心思想: 批量归一化的目标是确保网络每一层的预激活值(pre-activations)服从高斯分布。虽然良好的初始化能达到这一效果,但在多层网络中难以保证。批量归一化通过对 batch 维度上的预激活值进行归一化,在传入激活函数前确保其分布接近高斯分布。
优点:
该归一化是可导的,不影响模型的优化过程。
通过减少内部协变量偏移(Internal Covariate Shift),加速训练并提升稳定性。
实现#
代码回顾#
我们将基于上一节的代码实现 批量归一化。
import torch
import torch.nn.functional as F
%matplotlib inline
words = open('../05_NLP/prenoms.txt', 'r').read().splitlines()
chars = sorted(list(set(''.join(words))))
stoi = {s:i+1 for i,s in enumerate(chars)}
stoi['.'] = 0
itos = {i:s for s,i in stoi.items()}
block_size = 3 # Contexte
def build_dataset(words):
X, Y = [], []
for w in words:
context = [0] * block_size
for ch in w + '.':
ix = stoi[ch]
X.append(context)
Y.append(ix)
context = context[1:] + [ix]
X = torch.tensor(X)
Y = torch.tensor(Y)
print(X.shape, Y.shape)
return X, Y
import random
random.seed(42)
random.shuffle(words)
n1 = int(0.8*len(words))
n2 = int(0.9*len(words))
Xtr, Ytr = build_dataset(words[:n1]) # 80%
Xdev, Ydev = build_dataset(words[n1:n2]) # 10%
Xte, Yte = build_dataset(words[n2:]) # 10%
torch.Size([180834, 3]) torch.Size([180834])
torch.Size([22852, 3]) torch.Size([22852])
torch.Size([22639, 3]) torch.Size([22639])
embed_dim=10 # Dimension de l'embedding de C
hidden_dim=200 # Dimension de la couche cachée
C = torch.randn((46, embed_dim))
W1 = torch.randn((block_size*embed_dim, hidden_dim))*0.01 # On initialise les poids à une petite valeur
b1 = torch.randn(hidden_dim) *0 # On initialise les biais à 0
W2 = torch.randn((hidden_dim, 46))*0.01
b2 = torch.randn(46)*0
parameters = [C, W1, b1, W2, b2]
for p in parameters:
p.requires_grad = True
以下是前向传播的代码:
batch_size = 32
ix = torch.randint(0, Xtr.shape[0], (batch_size,))
# Forward
Xb, Yb = Xtr[ix], Ytr[ix]
emb = C[Xb]
embcat = emb.view(emb.shape[0], -1)
hpreact = embcat @ W1 + b1
h = torch.tanh(hpreact)
logits = h @ W2 + b2
loss = F.cross_entropy(logits, Yb)
批量归一化的实现#
根据论文,批量归一化的步骤如下:
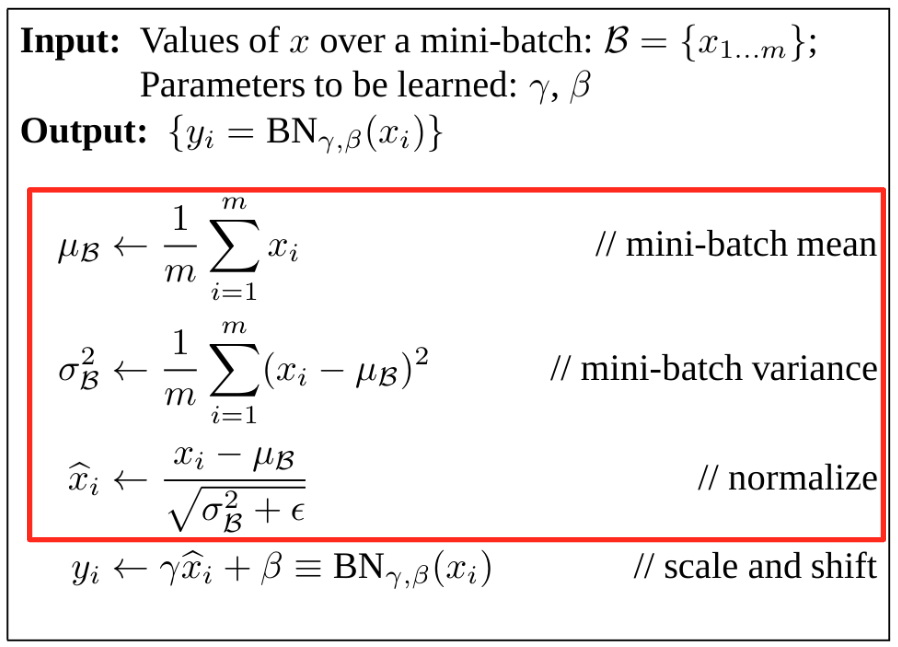
第一步:归一化
计算预激活值 hpreact 的均值(\(\mu\))和标准差(\(\sigma\))。
使用以下公式对 hpreact 进行归一化: \( \hat{h} = \frac{h_{preact} - \mu}{\sigma + \epsilon} \) (\(\epsilon\) 为小常数,避免分母为零)
epsilon=1e-6
hpreact_mean = hpreact.mean(dim=0, keepdim=True)
hpreact_std= hpreact.std(dim=0, keepdim=True)
hpreact_norm = (hpreact - hpreact_mean) / (hpreact_std+epsilon)
第二步:集成到前向传播 将上述归一化步骤嵌入前向传播中。
缩放与平移(Scale and Shift) 归一化后的数据服从标准高斯分布(均值 0,方差 1),但这会限制模型的表达能力。为此,引入两个可学习参数:
\(\gamma\)(缩放):调整数据的方差。
\(\beta\)(平移):调整数据的均值。
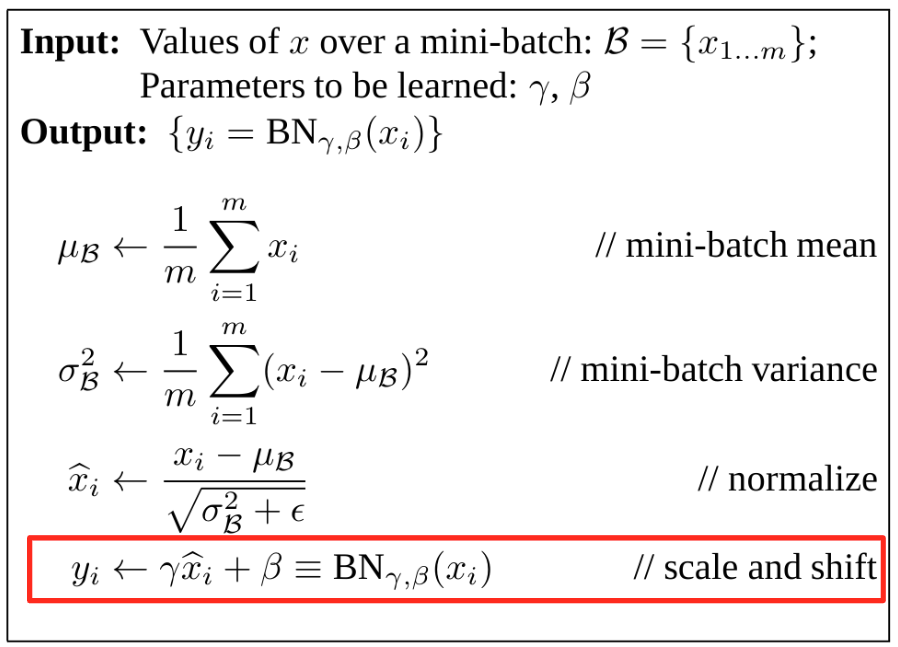
公式: \( y = \gamma \hat{h} + \beta \)
注意:\(\gamma\) 和 \(\beta\) 需作为模型参数进行优化。
C = torch.randn((46, embed_dim))
W1 = torch.randn((block_size*embed_dim, hidden_dim))*0.01 # On initialise les poids à une petite valeur
b1 = torch.randn(hidden_dim) *0 # On initialise les biais à 0
W2 = torch.randn((hidden_dim, 46))*0.01
b2 = torch.randn(46)*0
# Paramètres de batch normalization
bngain = torch.ones((1, hidden_dim))
bnbias = torch.zeros((1, hidden_dim))
parameters = [C, W1, b1, W2, b2, bngain, bnbias]
for p in parameters:
p.requires_grad = True
前向传播的最终表达式为:
batch_size = 32
ix = torch.randint(0, Xtr.shape[0], (batch_size,))
# Forward
Xb, Yb = Xtr[ix], Ytr[ix]
emb = C[Xb]
embcat = emb.view(emb.shape[0], -1)
hpreact = embcat @ W1 + b1
# Batch normalization
bnmean = hpreact.mean(0, keepdim=True)
bnstd = hpreact.std(0, keepdim=True)
hpreact = bngain * (hpreact - bnmean) / bnstd + bnbias
h = torch.tanh(hpreact)
logits = h @ W2 + b2
loss = F.cross_entropy(logits, Yb)
批量归一化的潜在问题#
批量归一化在实践中可能面临以下挑战:
1. 批次内依赖性
归一化基于 batch 维度进行,意味着每个样本的归一化结果会受同批次其他样本影响。
影响:
理论上可能引入噪声,但实践中这种随机性反而起到 正则化 作用,减少过拟合风险。
若希望避免批次依赖,可使用 LayerNorm 或 GroupNorm 等替代方案。但 BatchNorm 仍因经验效果佳而广泛应用。
2. 训练与推理不一致
训练阶段:样本的归一化依赖于批次内其他样本的统计量(均值/方差)。
推理阶段:单个样本无法计算批次统计量,导致行为不一致。
解决方案:
指数移动平均(EMA): 在训练过程中动态更新全局均值/方差的估计值,避免额外遍历数据集。 实现示例(Python):
# 伪代码:EMA 更新 running_mean = momentum * running_mean + (1 - momentum) * batch_mean running_var = momentum * running_var + (1 - momentum) * batch_var
momentum典型值为 0.1(PyTorch 默认值),可根据批次大小与数据集规模调整。
C = torch.randn((46, embed_dim))
W1 = torch.randn((block_size*embed_dim, hidden_dim))*0.01 # On initialise les poids à une petite valeur
b1 = torch.randn(hidden_dim) *0 # On initialise les biais à 0
W2 = torch.randn((hidden_dim, 46))*0.01
b2 = torch.randn(46)*0
# Paramètres de batch normalization
bngain = torch.ones((1, hidden_dim))
bnbias = torch.zeros((1, hidden_dim))
bnmean_running = torch.zeros((1, hidden_dim))
bnstd_running = torch.ones((1, hidden_dim))
parameters = [C, W1, b1, W2, b2, bngain, bnbias]
for p in parameters:
p.requires_grad = True
batch_size = 32
ix = torch.randint(0, Xtr.shape[0], (batch_size,))
# Forward
Xb, Yb = Xtr[ix], Ytr[ix]
emb = C[Xb]
embcat = emb.view(emb.shape[0], -1)
hpreact = embcat @ W1 + b1
# Batch normalization
bnmeani = hpreact.mean(0, keepdim=True)
bnstdi = hpreact.std(0, keepdim=True)
hpreact = bngain * (hpreact - bnmeani) / bnstdi + bnbias
with torch.no_grad(): # On ne veut pas calculer de gradient pour ces opérations
bnmean_running = 0.999 * bnmean_running + 0.001 * bnmeani
bnstd_running = 0.999 * bnstd_running + 0.001 * bnstdi
h = torch.tanh(hpreact)
logits = h @ W2 + b2
loss = F.cross_entropy(logits, Yb)
注意:
在我们的实现中,EMA 的
momentum设为 0.001。PyTorch 的 BatchNorm 层 默认
momentum=0.1。选择建议:
大批次 + 小数据集:可使用较大值(如 0.1)。
小批次 + 大数据集:建议使用较小值(如 0.001),以更精确地估计全局统计量。
现在我们训练模型,验证批量归一化层的功能。 注意:在小型模型中,性能差异可能不明显。
lossi = []
max_steps = 200000
for i in range(max_steps):
ix = torch.randint(0, Xtr.shape[0], (batch_size,))
Xb, Yb = Xtr[ix], Ytr[ix]
emb = C[Xb]
embcat = emb.view(emb.shape[0], -1)
hpreact = embcat @ W1 + b1
# Batch normalization
bnmeani = hpreact.mean(0, keepdim=True)
bnstdi = hpreact.std(0, keepdim=True)
hpreact = bngain * (hpreact - bnmeani) / bnstdi + bnbias
with torch.no_grad(): # On ne veut pas calculer de gradient pour ces opérations
bnmean_running = 0.999 * bnmean_running + 0.001 * bnmeani
bnstd_running = 0.999 * bnstd_running + 0.001 * bnstdi
h = torch.tanh(hpreact)
logits = h @ W2 + b2
loss = F.cross_entropy(logits, Yb)
for p in parameters:
p.grad = None
loss.backward()
lr = 0.1 if i < 100000 else 0.01
for p in parameters:
p.data += -lr * p.grad
if i % 10000 == 0:
print(f'{i:7d}/{max_steps:7d}: {loss.item():.4f}')
lossi.append(loss.log10().item())
0/ 200000: 3.8241
10000/ 200000: 1.9756
20000/ 200000: 2.7151
30000/ 200000: 2.3287
40000/ 200000: 2.1411
50000/ 200000: 2.3207
60000/ 200000: 2.3250
70000/ 200000: 2.0320
80000/ 200000: 2.0615
90000/ 200000: 2.2468
100000/ 200000: 2.2081
110000/ 200000: 2.1418
120000/ 200000: 1.9665
130000/ 200000: 1.8572
140000/ 200000: 2.0577
150000/ 200000: 2.1804
160000/ 200000: 1.8604
170000/ 200000: 1.9810
180000/ 200000: 1.8228
190000/ 200000: 1.9977
补充说明#
1. 偏置(Bias)的作用
批量归一化通过 中心化 预激活值,使得偏置项(bias)失去作用(因其仅平移分布)。
实践建议:
可移除偏置项,减少参数数量。
保留偏置项也不影响模型,但会增加冗余参数。
2. 批量归一化的位置
理论位置:应置于激活函数 之前,以归一化预激活值。
实践变体:部分研究/代码将其置于激活函数 之后,需根据具体框架灵活调整。
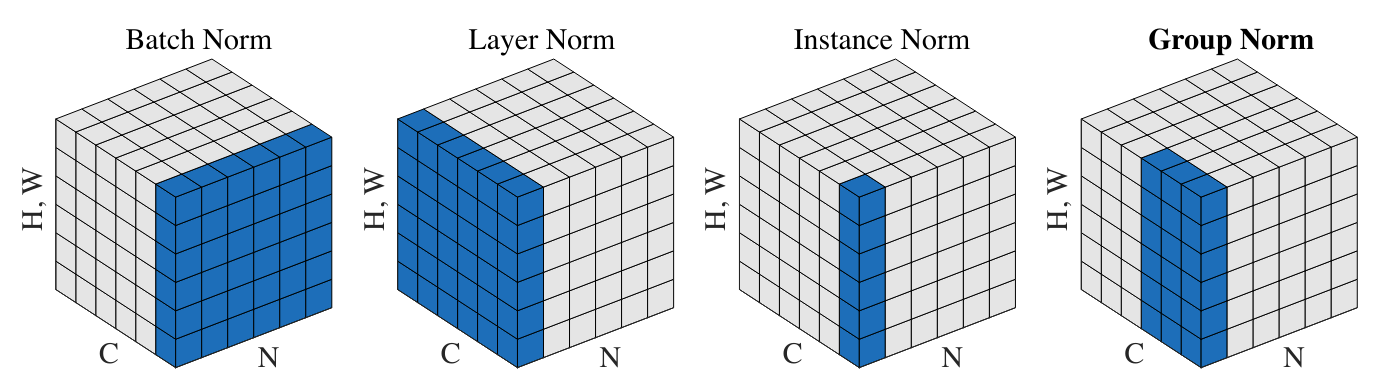
其他归一化方法#
除批量归一化外,深度学习中常用的归一化方法还包括:
 图片来源:文章
图片来源:文章
1. 层归一化(Layer Normalization)
应用场景:广泛用于语言模型(如 GPT、Llama)。
归一化维度:对 单个样本的所有特征 进行归一化(而非批次维度)。
实现变化: 在代码中,仅需将归一化轴从
axis=0(批次维度)改为axis=1(特征维度)。
# Batch normalization
bnmeani = hpreact.mean(0, keepdim=True)
bnstdi = hpreact.std(0, keepdim=True)
# Layer normalization
bnmeani = hpreact.mean(1, keepdim=True)
bnstdi = hpreact.std(1, keepdim=True)
2. 实例归一化(Instance Normalization)
对 每个样本的每个通道 独立归一化,常用于风格迁移任务。
3. 组归一化(Group Normalization)
折中方案:将通道分组,对每组内的数据进行归一化。
极端情况:
组大小 = 1 → 等同于 InstanceNorm。
组大小 = 通道数 → 等同于 LayerNorm。
优点:对批次大小不敏感,适用于小批次训练。,