图像中的目标检测简介#
图像处理主要分为三大类:
分类(Classification):判断图像中是否存在某个物体(例如:这是一张狗的照片吗?)。
检测(Detection):定位图像中物体的具体位置(例如:狗在哪里?)。
分割(Segmentation):识别属于某个物体的所有像素(例如:哪些像素属于这只狗?)。
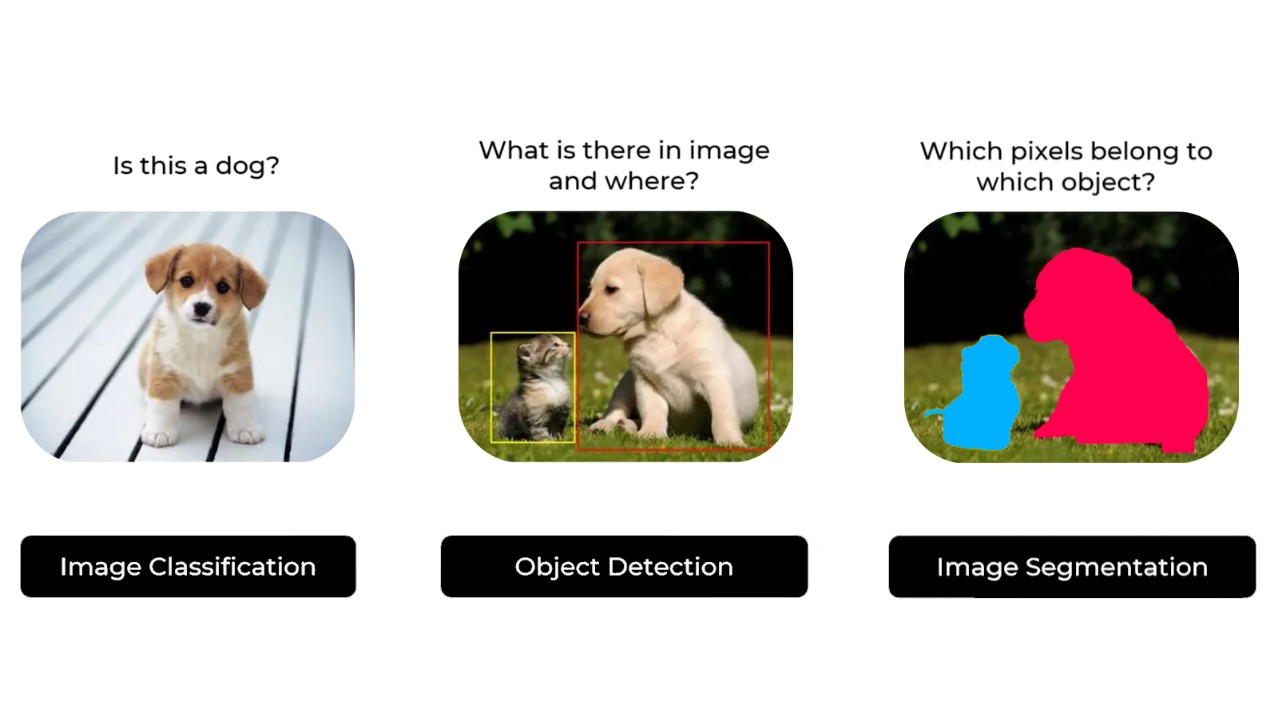
图片来源:Ultralytics 文档
在 CNN 课程中,我们学习了使用经典 CNN 架构(带全连接层)解决分类问题,以及使用 U-Net 模型解决分割问题。
目标检测的解释较为复杂,因此本课程将重点介绍现有方法,并详细描述 YOLO 模型。
首先,我们将介绍两种主要检测器的区别:
两阶段检测器(Two-Stage Detectors):包括 RCNN(基于区域的卷积神经网络) 系列模型。
单阶段检测器(Single-Stage Detectors):包括 YOLO(You Only Look Once) 系列模型。
两阶段检测器#
顾名思义,两阶段检测器 通过以下两个步骤进行目标检测:
第一阶段:生成候选区域(Region Proposal),即可能包含目标物体的图像区域。
第二阶段:精化检测结果,包括确定物体类别和优化边界框(Bounding Box)的精确度。
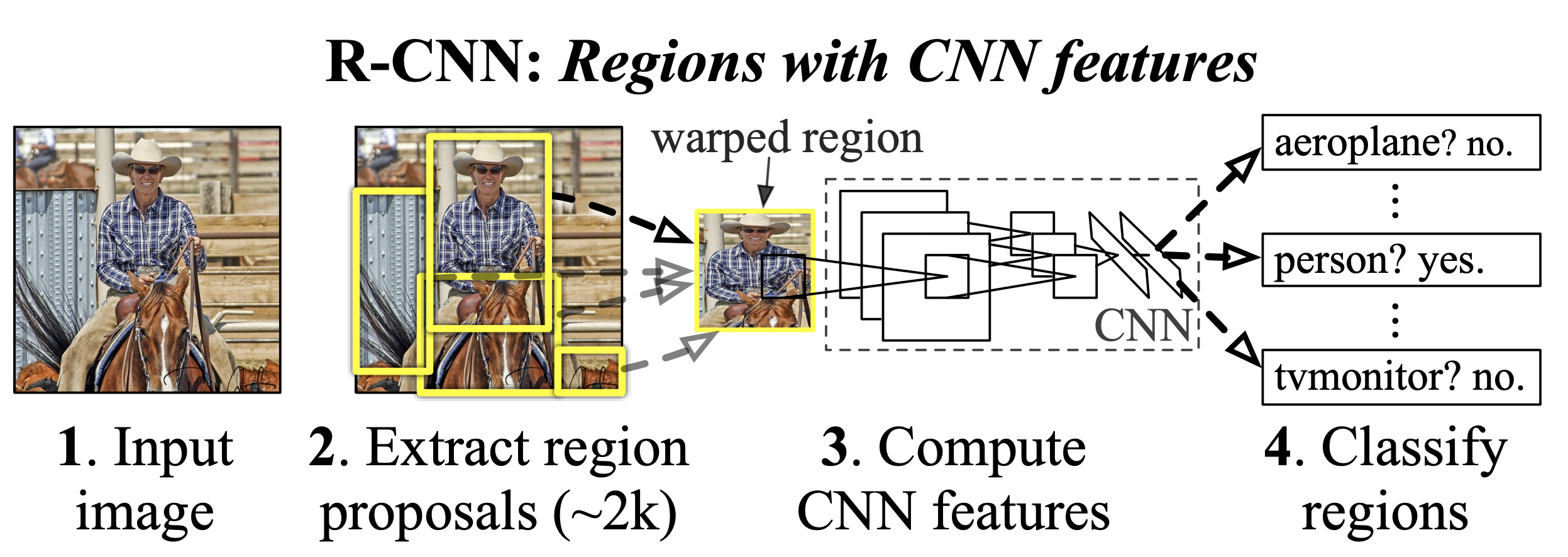
图片来源:RCNN 论文
通常,两阶段检测器 检测精度高,适用于复杂场景,但速度较慢,无法实现实时处理。
最著名的两阶段检测器是 RCNN 系列模型。详情请参阅:RCNN 介绍博文
单阶段检测器#
单阶段检测器 仅需一步即可生成带标签的边界框(Bounding Box)。模型将图像划分为网格,并为每个网格单元预测多个边界框及其对应的概率。
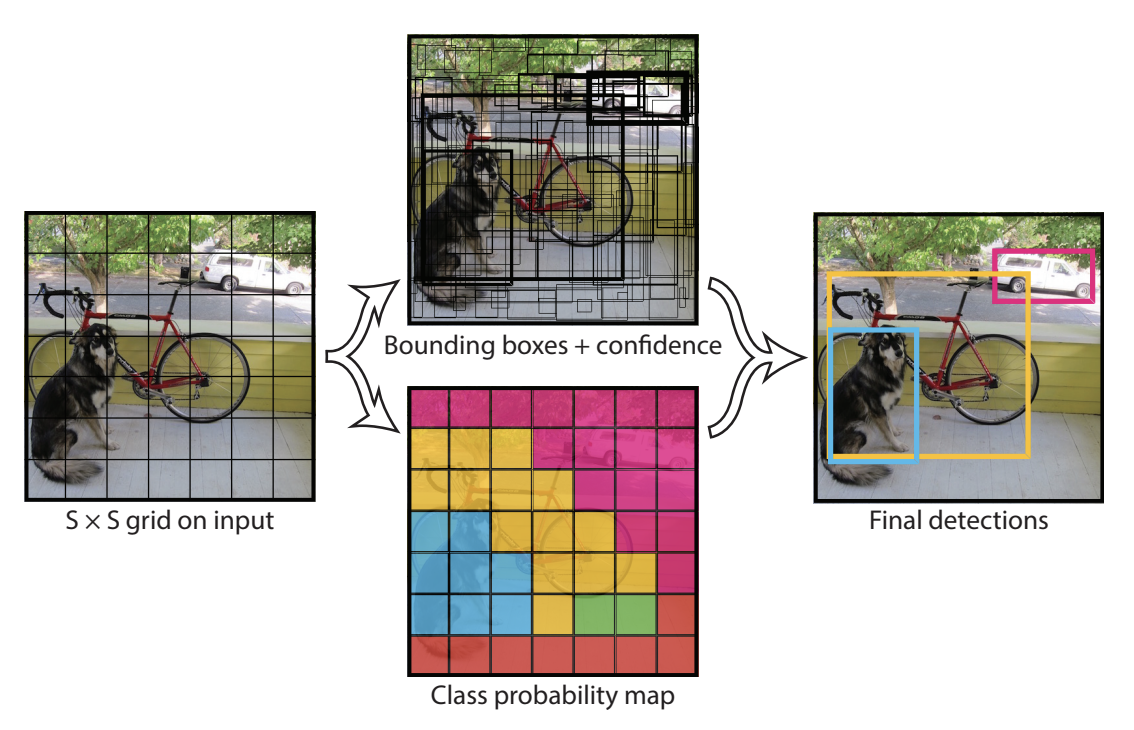
图片来源:YOLO 论文
单阶段检测器 的精度通常低于两阶段检测器,但速度更快,能够实现实时处理,是当前应用最广泛的检测器类型。
非极大值抑制与锚框#
非极大值抑制(NMS)#
在目标检测中,模型可能会在同一物体上生成多个重叠的边界框(Bounding Box)。为了向用户提供最优的单一检测结果,非极大值抑制(NMS) 算法应运而生。
本课程不详细展开该算法,但可参考以下资源:

锚框(Anchor Boxes)#
锚框(Anchor Boxes) 是预先定义的边界框,均匀分布在覆盖图像的网格上。它们具有不同的长宽比和尺寸,以适应各种可能的物体大小。锚框减少了模型需要检测的位置数量,模型仅需预测相对于锚框的偏移量及物体存在的概率。
该方法能显著提升检测质量。详情请参阅:锚框介绍博文。
在实际应用中,锚框数量通常较多。下图展示了 RetinaNet 模型中 1% 的锚框:

扩展:基于 Transformer 的目标检测#
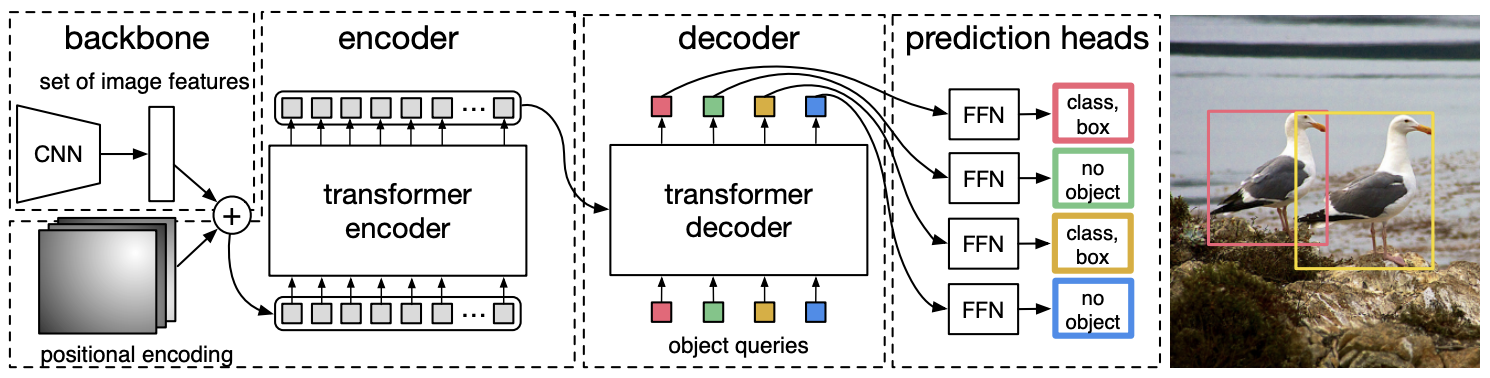
近期,Transformer 架构 被应用于目标检测领域。DETR 模型 使用 CNN 提取图像的视觉特征,然后通过 Transformer Encoder(带位置编码)利用注意力机制(Attention)分析特征间的空间关系。Transformer Decoder(不同于 NLP 中的解码器)以 Encoder 的输出(Keys 和 Values)和物体标签的嵌入(Queries)为输入,将嵌入转换为预测结果。最后,一个线性层处理解码器输出,生成物体类别和边界框(Bounding Boxes)。
详情请参阅:
该方法具有以下优势:
无需 NMS、锚框或候选区域生成,简化了模型架构和训练流程。
通过注意力机制(Attention),模型能更好地理解场景的全局信息。
但也存在一些缺点:
Transformer 计算量大,速度不及 YOLO 等单阶段检测器。
训练时间通常长于基于 CNN 的检测器。
注:在视觉任务中,Transformer 的训练时间通常长于 CNN。可能的原因是 CNN 具有针对图像的内在偏置,能更高效地学习图像特征,而 Transformer 作为通用模型,需从零开始学习。