无监督异常检测的知识蒸馏#
本笔记本实践了无监督异常检测中的知识蒸馏方法。
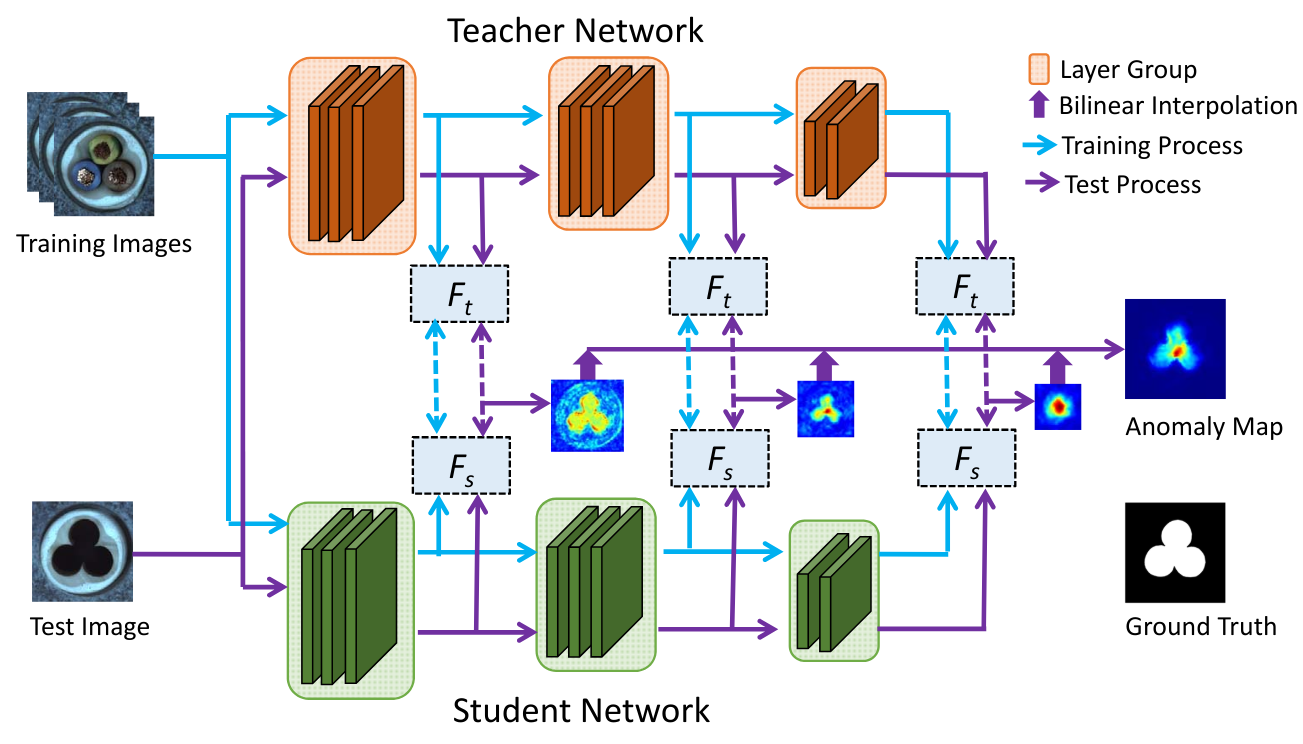
我们参考了论文 Student-Teacher Feature Pyramid Matching for Anomaly Detection 及其配套代码。下图(来自该论文)展示了该方法的工作原理:
主干网络与数据集的选择#
主干网络与损失函数#
该论文采用 ResNet18 作为网络架构,教师模型在 ImageNet 上预训练,学生模型使用相同架构但随机初始化权重。
如上图所示,损失函数基于 ResNet18 前三个层组的输出计算。每个层组包含处理相同图像分辨率的所有层。学生模型仅在这三个输出上学习复现教师模型的特征图。异常得分也基于这些输出计算。
使用的损失函数是均方误差(MSE),即逐像素计算两个特征图的欧氏距离,再对所有特征图求和得到总损失: \(D(I_1, I_2) = \sqrt{\sum_{i=1}^{m} \sum_{j=1}^{n} \left( I_1(i,j) - I_2(i,j) \right)^2}\)
数据集#
论文使用的数据集是 MVTEC AD,包含 15 个类别(10 个物体 + 5 个纹理)。每个类别约有 350 张无缺陷图像用于训练,100 张有缺陷图像用于测试。
数据集示例如下:
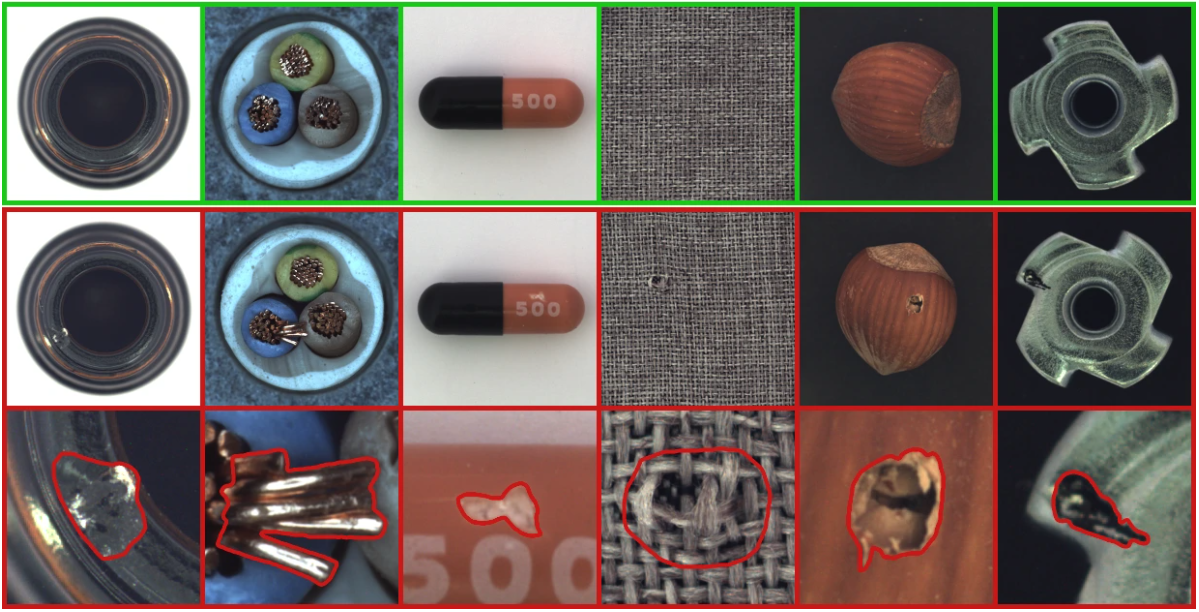
可通过此链接下载数据集。本实验将使用 **hazelnut(榛子)**类别。
使用 PyTorch 与 timm 实现#
部分函数(如数据集加载)较为复杂,但理解核心概念并非必需。为保持清晰,这些辅助函数已移至 utils.py,可按需查阅。
import matplotlib.pyplot as plt
from utils import MVTecDataset,cal_anomaly_maps
import torch
import torch.nn as nn
import timm
import torch.nn.functional as F
import numpy as np
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
/home/aquilae/anaconda3/envs/dev/lib/python3.11/site-packages/tqdm/auto.py:21: TqdmWarning: IProgress not found. Please update jupyter and ipywidgets. See https://ipywidgets.readthedocs.io/en/stable/user_install.html
from .autonotebook import tqdm as notebook_tqdm
数据集处理#
首先加载数据集并查看其内容。 本次实验将训练集显式划分为训练子集与验证子集,以便在训练过程中评估模型性能。
train_dataset = MVTecDataset(root_dir="../data/mvtec/hazelnut/train/good",resize_shape=[256,256],phase='train')
test_dataset = MVTecDataset(root_dir="../data/mvtec/hazelnut/test/",resize_shape=[256,256],phase='test')
print("taille du dataset d'entrainement : ",len(train_dataset))
print("taille du dataset de test : ",len(test_dataset))
print("taille d'une image : ",train_dataset[0]['imageBase'].shape)
# Séparation du dataset d'entrainement en train et validation
img_nums = len(train_dataset)
valid_num = int(img_nums * 0.2)
train_num = img_nums - valid_num
train_data, val_data = torch.utils.data.random_split(train_dataset, [train_num, valid_num])
# Création des dataloaders
train_loader=torch.utils.data.DataLoader(train_data, batch_size=4, shuffle=True)
val_loader=torch.utils.data.DataLoader(val_data, batch_size=4, shuffle=True)
test_loader=torch.utils.data.DataLoader(test_dataset, batch_size=1, shuffle=False)
taille du dataset d'entrainement : 391
taille du dataset de test : 110
taille d'une image : (3, 256, 256)
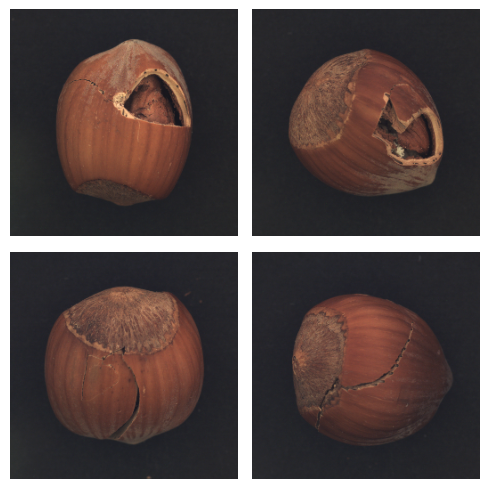
可视化部分缺陷样本:
num_defects_displayed = 0
fig, axes = plt.subplots(2, 2, figsize=(5, 5))
for sample in test_loader:
image = sample['imageBase']
has_defect = sample['has_anomaly']
if has_defect:
row = num_defects_displayed // 2
col = num_defects_displayed % 2
axes[row, col].imshow(image.squeeze().permute(1, 2, 0).numpy())
axes[row, col].axis('off')
num_defects_displayed += 1
if num_defects_displayed == 4:
break
plt.tight_layout()
plt.show()
构建教师与学生模型#
我们将使用同一类实现两个模型,通过参数区分教师/学生模型的特性。 为简化预训练主干网络的使用,我们采用 timm 库(PyTorch Image Models)。该库提供:
丰富的预训练主干网络与模型
灵活的网络操作接口
class resnet18timm(nn.Module):
def __init__(self,backbone_name="resnet18",out_indices=[1,2,3],pretrained=True):
super(resnet18timm, self).__init__()
# Features only permet permet de ne récupérer que les features et pas la sortie du réseau, out_indices permet de choisir les couches à récupérer
self.feature_extractor = timm.create_model(backbone_name,pretrained=pretrained,features_only=True,out_indices=out_indices)
if pretrained:
# Si le modèle est pré-entrainé (donc c'est le teacher), on gèle les poids
self.feature_extractor.eval()
for param in self.feature_extractor.parameters():
param.requires_grad = False
def forward(self, x):
features = self.feature_extractor(x)
return features
现在可实例化教师模型与学生模型:
student=resnet18timm(backbone_name="resnet18",out_indices=[1,2,3],pretrained=False).to(device)
teacher=resnet18timm(backbone_name="resnet18",out_indices=[1,2,3],pretrained=True).to(device)
损失函数#
损失函数采用欧氏距离(MSE),定义为: \(D(I_1, I_2) = \sqrt{\sum_{i=1}^{m} \sum_{j=1}^{n} \left( I_1(i,j) - I_2(i,j) \right)^2}\),其中 \(I_1\)、\(I_2\) 分别为教师/学生模型的特征图。
实现中,我们对三组特征图对分别计算该距离,并汇总为总体损失。
class loss_kdad:
def __init__(self):
pass
# fs_list : liste des features du student et ft_list : liste des features du teacher
def __call__(self,fs_list, ft_list):
t_loss = 0
N = len(fs_list)
for i in range(N):
fs = fs_list[i]
ft = ft_list[i]
_, _, h, w = fs.shape
# Normaliser les features améliore les résultats
fs_norm = F.normalize(fs, p=2)
ft_norm = F.normalize(ft, p=2)
# Calcul de la distance euclidienne
f_loss = 0.5 * (ft_norm - fs_norm) ** 2
# On prend la moyenne de la loss sur tous les pixels
f_loss = f_loss.sum() / (h * w)
t_loss += f_loss
return t_loss / N
模型训练#
设置超参数:
epochs= 20
lr=0.0004
criterion = loss_kdad()
optimizer = torch.optim.Adam(student.parameters(), lr=lr)
开始训练模型!(训练可能需较长时间)
for epoch in range(epochs):
student.train()
train_loss = 0.0
for data in train_loader:
image = data['imageBase'].to(device)
optimizer.zero_grad()
outputs_student = student(image)
outputs_teacher = teacher(image)
loss = criterion(outputs_student,outputs_teacher)
loss.backward()
optimizer.step()
train_loss += loss.item()
student.eval()
val_loss = 0.0
for data in val_loader:
image = data['imageBase'].to(device)
outputs_student = student(image)
outputs_teacher = teacher(image)
loss = criterion(outputs_student,outputs_teacher)
val_loss += loss.item()
print("Epoch {} - train loss : {} - val loss : {}".format(epoch,train_loss/len(train_loader),val_loss/len(val_loader)))
Epoch 0 - train loss : 1.6731480107277255 - val loss : 1.3833315640687942
Epoch 1 - train loss : 0.8773692731238618 - val loss : 0.7371394574642182
Epoch 2 - train loss : 0.5567233881241158 - val loss : 0.5115290269255638
Epoch 3 - train loss : 0.4170471341172351 - val loss : 0.4163943402469158
Epoch 4 - train loss : 0.33714089627507365 - val loss : 0.3523293524980545
Epoch 5 - train loss : 0.29374887162371527 - val loss : 0.28786116763949393
Epoch 6 - train loss : 0.2577011583349373 - val loss : 0.2747397504746914
Epoch 7 - train loss : 0.2373752082827725 - val loss : 0.22077917009592057
Epoch 8 - train loss : 0.21801123603046696 - val loss : 0.2255100306123495
Epoch 9 - train loss : 0.2012799475577813 - val loss : 0.19499738812446593
Epoch 10 - train loss : 0.1874875887473927 - val loss : 0.20737174898386002
Epoch 11 - train loss : 0.17415884736029408 - val loss : 0.254209216684103
Epoch 12 - train loss : 0.16137944416532032 - val loss : 0.15532575249671937
Epoch 13 - train loss : 0.14706034665998025 - val loss : 0.1503308217972517
Epoch 14 - train loss : 0.13900368472066107 - val loss : 0.14076187387108802
Epoch 15 - train loss : 0.1303630452367324 - val loss : 0.12805806174874307
Epoch 16 - train loss : 0.1270840932862668 - val loss : 0.3456251971423626
Epoch 17 - train loss : 0.1299520534333549 - val loss : 0.12075391858816147
Epoch 18 - train loss : 0.11812143749262713 - val loss : 0.11526557803153992
Epoch 19 - train loss : 0.1135895169233974 - val loss : 0.11893145311623812
训练完成后,我们使用 AUROC 指标评估模型(回顾见第 9 课)。
scores = []
test_imgs = []
gt_list = []
for sample in test_loader:
label=sample['has_anomaly']
image = sample['imageBase'].to(device)
test_imgs.extend(image.cpu())
gt_list.extend(label.cpu().numpy())
with torch.set_grad_enabled(False):
outputs_student = student(image)
outputs_teacher = teacher(image)
# La fonction cal_anomaly_maps permet de calculer la carte d'anomalie (ça sera utile pour la visualisation après)
score =cal_anomaly_maps(outputs_student,outputs_teacher,256)
scores.append(score)
scores = np.asarray(scores)
gt_list = np.asarray(gt_list)
from sklearn.metrics import roc_auc_score
map_scores = np.asarray(scores)
max_anomaly_score = map_scores.max()
min_anomaly_score = map_scores.min()
map_scores = (map_scores - min_anomaly_score) / (max_anomaly_score - min_anomaly_score)
img_scores = map_scores.reshape(map_scores.shape[0], -1).max(axis=1)
gt_list = np.asarray(gt_list)
img_roc_auc = roc_auc_score(gt_list, img_scores)
print(" image hazelnut ROCAUC : %.3f" % (img_roc_auc))
image hazelnut ROCAUC : 0.990
模型在榛子缺陷检测上取得极高的 AUROC 分数,表现优异。
异常热力图可视化#
我们通过比较教师/学生模型在三个不同尺度输出上的特征图计算异常得分。使用 cal_anomaly_maps 函数:
对每组特征图计算差异
将差异映射回原始图像尺寸,生成异常热力图
热力图可直观显示缺陷的空间定位
fig, axs = plt.subplots(2, 2, figsize=(5, 5))
for i,(img,mask) in enumerate(zip(test_imgs,scores)):
img_act=img.squeeze().permute(1, 2, 0).numpy()
row = i // 2
col = i % 2
axs[row, col].imshow(img_act)
axs[row, col].imshow(mask, cmap='jet', alpha=0.5)
axs[row, col].axis('off')
if i==3:
break
plt.tight_layout()
plt.show()
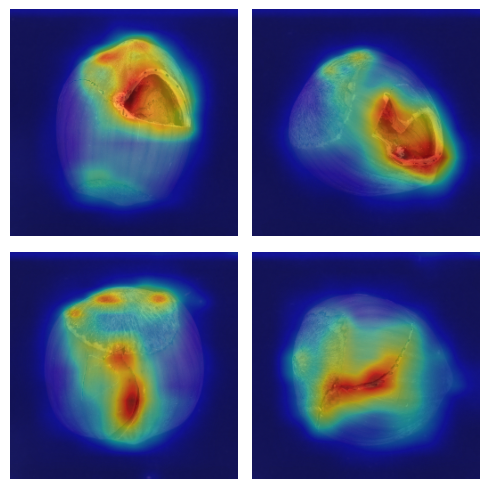
尽管定位并非模型的主要目标,但结果显示缺陷定位已相当精确。