扩散模型#
在本课程中,我们将介绍扩散模型(Diffusion Models)。这种模型于 2020 年在论文《Denoising Diffusion Probabilistic Models》中首次提出,并因其在图像生成领域的高效性而广泛应用。扩散模型性能强大且易于引导,但其主要缺点是运行速度较慢。 本课程参考了 CVPR 2022 教程 和 博客文章,并使用了来自这两个资源的插图。
工作原理#
扩散模型主要通过两个阶段工作:噪声添加(扩散过程,Diffusion Process)和噪声去除(逆过程或去噪过程,Reverse/Denoising Process)。这两个阶段均为迭代过程,即噪声是逐步添加或移除的。
第一阶段:扩散过程#
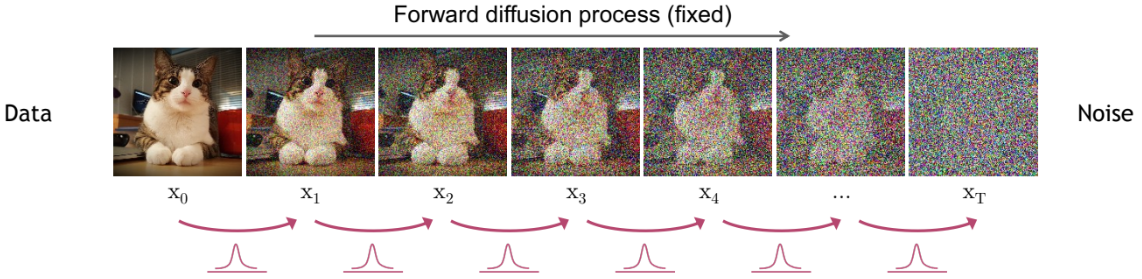
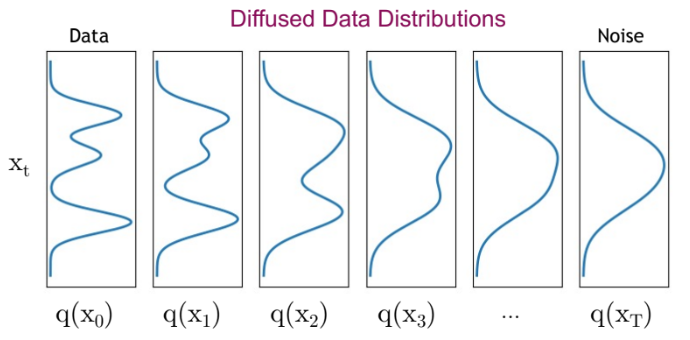
扩散模型的第一步是从数据集中选取一张图像。数据集的图像分布通常是一个复杂的概率分布。扩散过程通过迭代方式逐步向图像添加高斯噪声,逐渐降低其复杂性,最终得到一个简单的高斯分布。 下图展示了扩散过程:
可以观察到分布逐渐简化(复杂度降低):
扩散过程会逐步破坏输入图像的结构。
扩散过程由多个扩散步骤(Diffusion Steps)组成。在每一步中,会向图像添加预设量的高斯噪声。扩散步骤越多,每步添加的噪声越少。实践中,步骤越多,模型越稳定,生成的图像质量也越高,但计算时间会显著增加。原始论文中通常选择 1000 步。
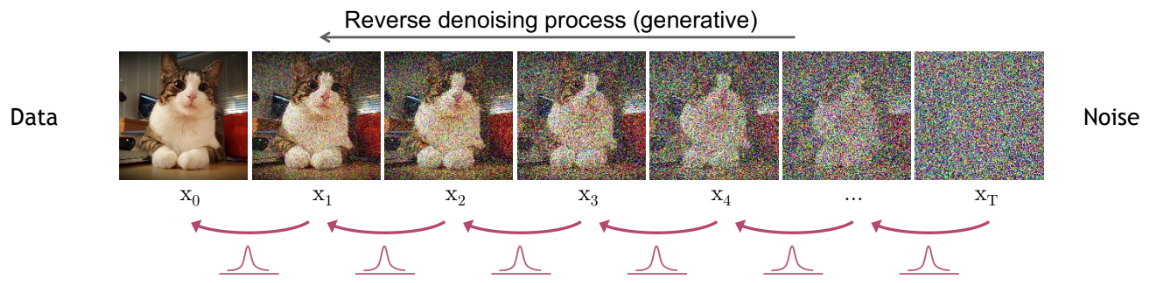
第二阶段:逆过程#
为什么要向图像添加噪声? 实际上,扩散过程是为了生成逆过程的训练数据。逆过程的目标是学习如何从高斯分布(通过扩散过程得到)恢复原始图像。我们希望能从扩散过程最后一步的高斯噪声中重建图像,进而通过采样高斯分布生成全新图像。
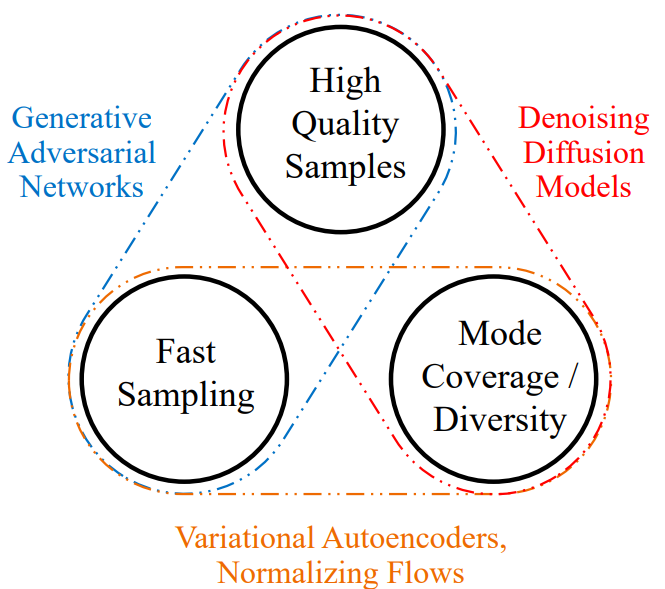
注解:扩散模型与正则化流(Normalizing Flows)或变分自编码器(VAE)有一定相似性。
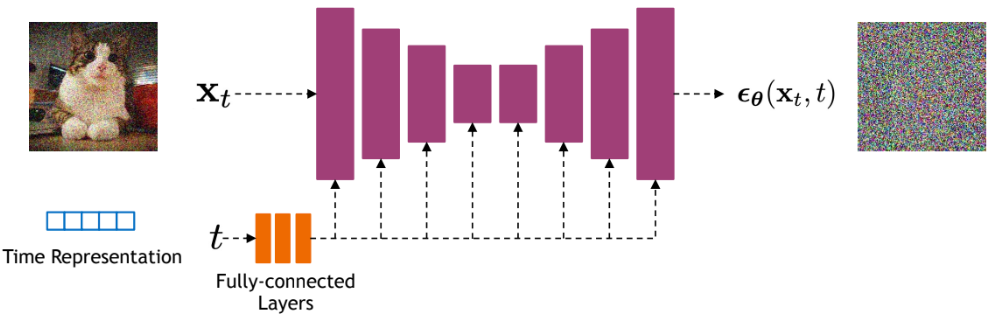
在每一步去噪中,我们使用一个神经网络,其输入为当前步骤 \(t\) 的图像和扩散步骤 \(t\),目标是预测在步骤 \(t-1 \Rightarrow t\) 中添加的高斯噪声参数(\(\mu\) 和 \(\sigma^2\))。
注解 1:预测噪声实际上等同于预测步骤 \(t-1\) 的图像。 注解 2:所有步骤共用同一个网络,而非每步使用不同的网络。
扩散模型通常采用 U-Net 架构。想了解 U-Net 的详细结构,可参考卷积网络课程 3:图像分割应用。在实践中,强大的模型(如 Stable Diffusion)会使用结合 Transformer 架构的 U-Net 变体。
扩散模型是否属于分层 VAE?#
如前所述,扩散模型与 VAE 或 正则化流 有相似之处。 我们可以将其与 分层 VAE 进行类比。分层 VAE 是一种具有多步图像生成(解码器)的 VAE。
在扩散模型中:
扩散过程 对应 VAE 的 编码器(Encoder),
逆过程 对应 VAE 的 多层次解码步骤。
但两者在实现上存在显著差异:
扩散模型的“编码器”是固定的(不可训练),仅执行噪声添加;
潜在空间与输入图像的维度相同(VAE 则不同);
扩散过程的所有步骤共用同一个模型,而分层 VAE 每层使用不同的模型。
类似的类比也适用于 正则化流。更多细节可参考 CVPR 2022 教程。
扩散模型的主要问题#
如前所述,扩散和去噪过程需要大量步骤。每一步去噪都需执行一次 U-Net 的前向传播。例如,1000 步扩散意味着生成一张图像需调用网络 1000 次。
扩散模型的核心问题由此显现:速度极慢。
图片来源:论文
扩散模型在图像生成方面的性能远超 GAN、VAE 和正则化流,因此是首选方案。
为此,必须开发各种技术以加速扩散模型。本课程不详细介绍加速方法,但 CVPR 2022 教程 有深入讨论(尽管此后又涌现了新技术)。 补充说明:目前已能在 十余步(而非原先的 1000 步)内生成高质量图像。
扩散模型目前是研究热点,仍有诸多问题待解决。例如:
为何扩散模型的性能远超 VAE 和正则化流?在深入理解扩散机制后,是否应重新关注这些替代方案?
能否实现单步生成高质量图像?
扩散架构是否可用于判别式任务(如分类)?
U-Net 是否是扩散模型的最优架构?
扩散模型能否扩展到其他数据类型(如文本)?