高级技术#
在这节课中,我们将探索一些技术,以提高神经网络的可靠性和训练便利性。 为了说明这些技术,我们将使用 MNIST 数据集,该数据集包含手写数字 1 到 9 的图像。 我们的目标是让网络接受图像作为输入,并识别图像代表的数字。
import torch
import torch.nn as nn
import torch.nn.functional as F
import torchvision.transforms as T
from torchvision import datasets
from torch.utils.data import DataLoader
import matplotlib.pyplot as plt
数据集的创建#
首先,我们下载 MNIST 数据集。torchvision 库允许我们用 PyTorch 处理图像,并提供了加载常见数据集的工具。
transform=T.ToTensor() # Pour convertir les éléments en tensor torch directement
dataset = datasets.MNIST(root='./../data', train=True, download=True,transform=transform)
test_dataset = datasets.MNIST(root='./../data', train=False,transform=transform)
# On peut visualiser les éléments du dataset
plt.imshow(dataset[0][0].permute(1,2,0).numpy(), cmap='gray')
plt.show()
print("Le chiffre sur l'image est un "+str(dataset[0][1]))
Le chiffre sur l'image est un 5
训练/验证/测试数据的分离#
如你所见,在加载数据集时,我们得到了一个 train_dataset 和一个 test_dataset。这是训练神经网络的一个重要实践。 实际上,在训练数据上的网络在同一数据上表现良好。因此,我们需要创建一个 测试数据集 来评估模型在训练过程中未见过的数据上的性能。
实际上,我们使用 3 个子数据集:
训练集 用于模型的训练。
验证集 用于在训练过程中评估模型。
测试集 用于训练结束后评估模型(这是最重要的结果)。
常见的做法是使用 60-20-20 的划分,即 60% 的数据用于训练,20% 用于验证,20% 用于测试。然而,这个建议并不适用于所有数据集。如果数据集包含大量图像,我们可以减少验证和测试数据的比例。例如,对于包含数十亿图像的数据集,我们通常使用 98-1-1 或甚至 99.8-0.1-0.1 的划分。
#Le train et test sont déjà séparé, on va donc séparer le train_dataset en train et validation
train_dataset, validation_dataset=torch.utils.data.random_split(dataset, [0.8,0.2])
# Création des dataloaders pour séparer en mini-batch automatiquement
train_loader = DataLoader(train_dataset, batch_size=64, shuffle=True)
val_loader= DataLoader(validation_dataset, batch_size=64, shuffle=True)
test_loader = DataLoader(test_dataset, batch_size=64, shuffle=False)
创建和训练第一个模型#
与之前的笔记本一样,我们创建一个全连接模型进行训练。由于输入数据是 \(28 \times 28\) 大小的图像,我们需要将它们转换为 \(28 \times 28=784\) 大小的 1D 向量以便输入到网络中。
class mlp(nn.Module):
def __init__(self, *args, **kwargs) -> None:
super().__init__(*args, **kwargs)
self.fc1=nn.Linear(784,256) # première couche cachée
self.fc2=nn.Linear(256,256) # seconde couche cachée
self.fc3=nn.Linear(256,10) # couche de sortie
# La fonction forward est la fonction appelée lorsqu'on fait model(x)
def forward(self,x):
x=x.view(-1,28*28) # Pour convertir l'image de taille 28x28 en tensor de taille 784
x=F.relu(self.fc1(x)) # le F.relu permet d'appliquer la fonction d'activation ReLU sur la sortie de notre couche
x=F.relu(self.fc2(x))
output=self.fc3(x)
return output
model = mlp()
print(model)
print("Nombre de paramètres", sum(p.numel() for p in model.parameters()))
mlp(
(fc1): Linear(in_features=784, out_features=256, bias=True)
(fc2): Linear(in_features=256, out_features=256, bias=True)
(fc3): Linear(in_features=256, out_features=10, bias=True)
)
Nombre de paramètres 269322
损失函数#
对于损失函数,我们使用 PyTorch 的 交叉熵损失,它对应于逻辑回归损失函数,适用于超过 2 个类别的情况。 损失函数如下: \(\text{Cross Entropy Loss} = -\frac{1}{N} \sum_{i=1}^{N} \sum_{c=1}^{C} y_{ic} \log(p_{ic})\) 其中:
\(N\) 是 mini-batch 中的样本数量。
\(C\) 是类别数量。
\(y_{ic}\) 是目标值(如果样本属于类别 \(c\),则为 1,否则为 0)。
\(p_{ic}\) 是属于类别 \(c\) 的预测概率。
# En pytorch
criterion = nn.CrossEntropyLoss()
超参数和训练#
epochs=5
learning_rate=0.001
optimizer=torch.optim.Adam(model.parameters(),lr=learning_rate)
模型训练(可能需要几分钟,具体取决于你的计算机性能)。
for i in range(epochs):
loss_train=0
for images, labels in train_loader:
preds=model(images)
loss=criterion(preds,labels)
optimizer.zero_grad()
loss.backward()
optimizer.step()
loss_train+=loss
if i % 1 == 0:
print(f"step {i} train loss {loss_train/len(train_loader)}")
loss_val=0
for images, labels in val_loader:
with torch.no_grad(): # permet de ne pas calculer les gradients
preds=model(images)
loss=criterion(preds,labels)
loss_val+=loss
if i % 1 == 0:
print(f"step {i} val loss {loss_val/len(val_loader)}")
step 0 train loss 0.29076647758483887
step 0 val loss 0.15385286509990692
step 1 train loss 0.10695428401231766
step 1 val loss 0.10097559541463852
step 2 train loss 0.07086848467588425
step 2 val loss 0.09286081790924072
step 3 train loss 0.05028771981596947
step 3 val loss 0.08867377787828445
step 4 train loss 0.04254501312971115
step 4 val loss 0.0835222601890564
在测试数据上验证模型#
现在模型已经训练完成,我们可以在 测试集 上验证其性能。
correct = 0
total = 0
for images,labels in test_loader:
with torch.no_grad():
preds=model(images)
_, predicted = torch.max(preds.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
test_acc = 100 * correct / total
print("Précision du modèle en phase de test : ",test_acc)
Précision du modèle en phase de test : 97.69
我们的模型在测试阶段取得了非常好的精度,这是一个好兆头。 然而,我们注意到在训练过程中,训练损失 比 验证损失 低。这是一个需要考虑的重要点,因为这意味着模型有轻微的 过拟合。
过拟合和欠拟合#
深度学习的一个关键点是模型不 过拟合 训练数据的能力。过拟合 对应于一个模型在训练数据上学习得太好,但无法对来自同一分布的新元素进行泛化。 为了理解这个原理,这里有一个图表,展示了 欠拟合(模型过于简单,无法学习数据的复杂性)、一个良好训练的模型和 过拟合 之间的区别。
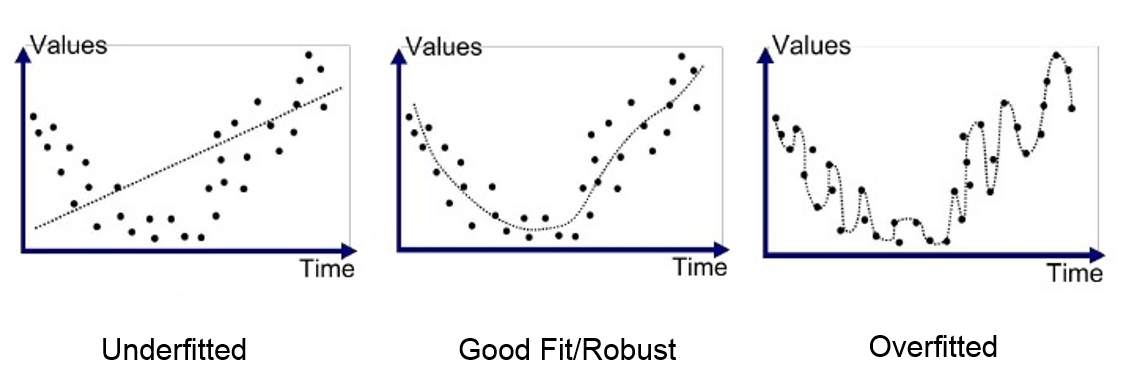
在 过拟合 最严重的情况下,模型在训练数据上几乎达到完美的精度,但在验证和测试数据上表现不佳。 在这节课中,我们将介绍 2 种方法来避免这个 过拟合 的问题。
L2 正则化#
L2 正则化是一种方法,它通过基于模型权重值的损失惩罚来实现。这个惩罚与模型权重值的平方成正比(需要注意的是,还存在 L1 正则化,它与模型权重值线性成正比)。这个惩罚鼓励模型的权重保持较小,并对训练数据的噪声不太敏感。 我们可以这样表达 L2 正则化: \(L(w) = L_0(w) + \lambda \sum_{i=1}^{n} w_i^2\) 其中:
\(L(w)\) 是正则化后的损失。
\(L_0(w)\) 是经典的损失函数。
\(\lambda\) 是正则化系数。
\(w_i\) 是模型的一个权重。
要了解更多关于 L2 正则化的知识,你可以参考 关于正则化的加分课程 或这篇 博客文章。
现在我们重新进行训练,并添加正则化。在 PyTorch 中,正则化通过在 优化器 中添加 weight_decay 参数来实现。weight_decay 的值对应于前面方程中的 \(\lambda\)。
model_with_reg=mlp()
epochs=5
learning_rate=0.001
optimizer=torch.optim.Adam(model_with_reg.parameters(),lr=learning_rate,weight_decay=1e-5)
for i in range(epochs):
loss_train=0
for images, labels in train_loader:
preds=model_with_reg(images)
loss=criterion(preds,labels)
optimizer.zero_grad()
loss.backward()
optimizer.step()
loss_train+=loss
if i % 1 == 0:
print(f"step {i} train loss {loss_train/len(train_loader)}")
loss_val=0
for images, labels in val_loader:
with torch.no_grad(): # permet de ne pas calculer les gradients
preds=model_with_reg(images)
loss=criterion(preds,labels)
loss_val+=loss
if i % 1 == 0:
print(f"step {i} val loss {loss_val/len(val_loader)}")
step 0 train loss 0.2986273467540741
step 0 val loss 0.1439662128686905
step 1 train loss 0.11165566742420197
step 1 val loss 0.10781095176935196
step 2 train loss 0.07492929697036743
step 2 val loss 0.09555892646312714
step 3 train loss 0.05378309637308121
step 3 val loss 0.08672302216291428
step 4 train loss 0.041800014674663544
step 4 val loss 0.0883878618478775
correct = 0
total = 0
for images,labels in test_loader:
with torch.no_grad():
preds=model_with_reg(images)
_, predicted = torch.max(preds.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
test_acc = 100 * correct / total
print("Précision du modèle en phase de test : ",test_acc)
Précision du modèle en phase de test : 97.73
差异并不明显,但我们注意到验证损失和训练损失之间的差异有所减少。
直觉:L2 正则化之所以有效,是因为通过惩罚大系数,它促成了权重更均匀分布的解。这减少了模型对训练数据特定变化的敏感性,从而提高了模型的健壮性和泛化能力。
Dropout#
另一种正则化方法是 Dropout。这种方法在训练的每一步中,随机地禁用网络中的一部分神经元(禁用的权重在训练过程中会变化)。每个层中的每个神经元都有一个概率 \(p\) 被禁用。
这种技术迫使网络不依赖于特定的神经元,而是学习更健壮且泛化更好的表示。我们可以将 Dropout 视为一种模型集合,其中每个模型都不同(因为某些神经元被禁用)。在测试阶段,我们取这些不同模型的“平均值”。在测试阶段,Dropout 被禁用。
要应用 Dropout,需要直接在网络架构中添加它。
class mlp_dropout(nn.Module):
def __init__(self, *args, **kwargs) -> None:
super().__init__(*args, **kwargs)
self.fc1=nn.Linear(784,256)
self.dropout1 = nn.Dropout(0.2) # on désactive 20% des neurones aléatoirement
self.fc2=nn.Linear(256,256)
self.dropout2 = nn.Dropout(0.2) # on désactive 20% des neurones aléatoirement
self.fc3=nn.Linear(256,10)
def forward(self,x):
x=x.view(-1,28*28)
x=F.relu(self.dropout1(self.fc1(x)))
x=F.relu(self.dropout2(self.fc2(x)))
output=self.fc3(x)
return output
model_with_dropout=mlp_dropout()
epochs=5
learning_rate=0.001
optimizer=torch.optim.Adam(model_with_dropout.parameters(),lr=learning_rate)
for i in range(epochs):
loss_train=0
for images, labels in train_loader:
preds=model_with_dropout(images)
loss=criterion(preds,labels)
optimizer.zero_grad()
loss.backward()
optimizer.step()
loss_train+=loss
if i % 1 == 0:
print(f"step {i} train loss {loss_train/len(train_loader)}")
loss_val=0
for images, labels in val_loader:
with torch.no_grad(): # permet de ne pas calculer les gradients
preds=model_with_dropout(images)
loss=criterion(preds,labels)
loss_val+=loss
if i % 1 == 0:
print(f"step {i} val loss {loss_val/len(val_loader)}")
step 0 train loss 0.3267715573310852
step 0 val loss 0.19353896379470825
step 1 train loss 0.13504144549369812
step 1 val loss 0.14174170792102814
step 2 train loss 0.10012412816286087
step 2 val loss 0.13484247028827667
step 3 train loss 0.07837768644094467
step 3 val loss 0.10895466059446335
step 4 train loss 0.0631122887134552
step 4 val loss 0.10599609464406967
correct = 0
total = 0
for images,labels in test_loader:
with torch.no_grad():
preds=model_with_dropout(images)
_, predicted = torch.max(preds.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
test_acc = 100 * correct / total
print("Précision du modèle en phase de test : ",test_acc)
Précision du modèle en phase de test : 96.96
我们再次看到训练结果有所改善。
直觉:Dropout 通过在训练过程中随机禁用神经元来改善泛化能力。这防止了模型过度依赖某些神经元,并促成了更健壮和多样化的特征分布。
批量归一化#
另一种改善神经网络训练的技术是 批量归一化(BatchNorm)。其原理是用均值为零、方差为 1 的分布对网络的每个层的输入进行归一化。 归一化是在整个 mini-batch 上进行的,具体如下:
对于一个 mini-batch \(B\) 和激活值 \(x\):
\(\mu_B = \frac{1}{m} \sum_{i=1}^m x_i\):\(m\) 个元素的激活值 \(x_i\) 的均值。
\(\sigma_B^2 = \frac{1}{m} \sum_{i=1}^m (x_i - \mu_B)^2\):\(m\) 个元素的激活值 \(x_i\) 的方差。
\(\hat{x}_i = \frac{x_i - \mu_B}{\sqrt{\sigma_B^2 + \epsilon}}\):\(x_i\) 的归一化值。
\(y_i = \gamma \hat{x}_i + \beta\):添加参数 \(\gamma\) 和 \(\beta\) 允许网络学习最佳的激活分布。
其中:
\(m\) 是 mini-batch \(B\) 的大小。
\(\epsilon\) 是一个用于避免除以零的小常数。
\(\gamma\) 和 \(\beta\) 是可学习的参数。
实际上,使用 BatchNorm 时,我们注意到 4 个主要优点:
加速训练:对每个层的输入进行归一化,允许使用更高的 学习率,从而加速训练的收敛。
减少对权重初始化的敏感性:BatchNorm 允许稳定激活值的分布,使网络对权重的初始化不那么敏感。
改善泛化能力:与 Dropout 和 L2 正则化一样,BatchNorm 作为一种正则化形式。这归因于通过在 batch 上进行归一化所引入的噪声。
减少“内部协变量移位”:在整个网络中稳定激活值,可以减少内部层的分布变化,从而简化学习。
需要记住的是,BatchNorm 提供了许多优点,因此建议始终使用它。
还存在其他归一化技术,如 LayerNorm、InstanceNorm、GroupNorm 等。 要了解更多关于 批量归一化 的知识,你可以完成 关于 批量归一化 的加分课程、阅读 论文 或阅读 博客文章。 要了解更多关于归一化对神经网络训练重要性的信息,你可以参考 博客文章。
要在 PyTorch 中实现 BatchNorm,需要在模型的构建过程中直接添加它。需要注意的是,我们通常在激活函数之前应用 BatchNorm,但两种方法都是可能的(在前或之后)。
class mlp_bn(nn.Module):
def __init__(self, *args, **kwargs) -> None:
super().__init__(*args, **kwargs)
self.fc1=nn.Linear(784,256)
self.bn1=nn.BatchNorm1d(256) # Batch Normalization
self.fc2=nn.Linear(256,256)
self.bn2=nn.BatchNorm1d(256) # Batch Normalization
self.fc3=nn.Linear(256,10)
def forward(self,x):
x=x.view(-1,28*28)
x=F.relu(self.bn1(self.fc1(x)))
x=F.relu(self.bn1(self.fc2(x)))
output=self.fc3(x)
return output
model_with_bn=mlp_bn()
epochs=5
learning_rate=0.001
optimizer=torch.optim.Adam(model_with_bn.parameters(),lr=learning_rate)
for i in range(epochs):
loss_train=0
for images, labels in train_loader:
preds=model_with_bn(images)
loss=criterion(preds,labels)
optimizer.zero_grad()
loss.backward()
optimizer.step()
loss_train+=loss
if i % 1 == 0:
print(f"step {i} train loss {loss_train/len(train_loader)}")
loss_val=0
for images, labels in val_loader:
with torch.no_grad(): # permet de ne pas calculer les gradients
preds=model_with_bn(images)
loss=criterion(preds,labels)
loss_val+=loss
if i % 1 == 0:
print(f"step {i} val loss {loss_val/len(val_loader)}")
step 0 train loss 0.20796926319599152
step 0 val loss 0.1327729970216751
step 1 train loss 0.09048832952976227
step 1 val loss 0.10177803039550781
step 2 train loss 0.0635765939950943
step 2 val loss 0.09861738979816437
step 3 train loss 0.045849185436964035
step 3 val loss 0.09643400460481644
step 4 train loss 0.0397462323307991
step 4 val loss 0.08524414896965027
correct = 0
total = 0
for images,labels in test_loader:
with torch.no_grad():
preds=model_with_bn(images)
_, predicted = torch.max(preds.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
test_acc = 100 * correct / total
print("Précision du modèle en phase de test : ",test_acc)
Précision du modèle en phase de test : 97.19
如你所见,BatchNorm 允许我们在相同的训练条件下获得更好的数据分数。